Differentiable physics · inverse problems
Differentiable Pendulum: Parameter Inference
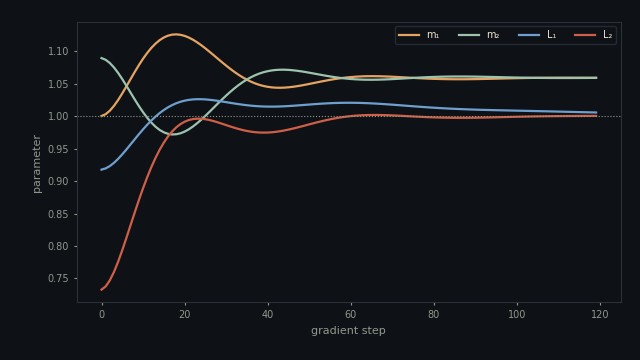
A double pendulum is chaotic, yet its physical parameters can still be read back out of the motion it traces. Treating the RK4 simulator as a differentiable forward model, gradient descent on a trajectory-matching loss (with finite-difference gradients in the parameters) recovers the bob masses and arm lengths from noisy observed trajectories — to within a few percent even at realistic noise. It is the inverse of the driven-pendulum chaos study: not predicting motion from parameters, but inferring parameters from motion.